王 进,王 笑,韩晨霞
(神木职业技术学院,陕西 神木 719300)
随着我国工业生产水平的进步,工业技术发展越来越迅速,不断提升了工业生产的效率[1-2]。其中,机械设备的使用是提升工作效率的关键。但由于生产流程复杂,机械设备电气安全问题易出现。电气自动化控制作为技术门类众多的综合性技术,是检测机械设备电气安全、确保设备正常运行的关键环节。为此,该领域研究者针对机械设备电气安全控制进行了很多研究,并取得了一定成果。文献[3]提出带有量化的信息物理系统安全控制;
文献[4]提出面向恶意攻击的安全稳定控制系统信息物理协调防御方法;
文献[5]提出马尔可夫信息物理系统拒绝服务攻击安全控制方法。由于上述方法未能在安全控制前依据预防控制结果制定安全控制原则,导致上述方法在开展安全控制时,机械设备的电压裕度值高、线路容载越限程度高以及控制时间长,存在一定局限性。
为解决上述安全控制方法中存在的问题,提出基于PLC的机械设备电气安全控制方法。
1.1 机械设备电气安全控制指标确定
1.1.1 获取设备裕度目标
依据机械设备发生故障时的负荷转供能力的大小,确定机械设备裕度[6]目标函数,表示为
(1)
minfy为建立的最小裕度目标函数;
Qfh为机械设备的电气负荷容量;
ΔQmin为设备中供电路径最小裕度。
计算过程中,设备供电路径最小裕度值若为非正数值,则可将其设定为最小正数,以此对目标函数实施惩罚,从而确定函数最优解。
对机械设备来说,裕度目标函数值越小,说明设备负荷与ΔQmin之间对比值越小,设备路径的均衡化程度越高。
1.1.2 电压目标函数
机械设备的电压水平是反映设备电气传输质量安全的重要环节。在预防控制时,需要将机械设备[7-8]电压稳定较高水平上,并设定相关电压阈值区间对其进行约束,过程表示为
(2)
Usx为机械设备的最高电压阈值;
Udx为机械设备的最低电压阈值;
minfdy为建立的电压目标函数。
机械设备在预防控制时,若电压出现越界现象,将上式中的分母调节为极小正数,以此对电压目标值实施惩罚,扩大电压目标值,削弱目标竞争力。
1.1.3 机械设备损耗目标
基于上述分析结果可知,机械设备在预防控制时,不仅要保障设备电气的安全性,同时还要保障设备经济运行,由此可制定机械设备有功损耗目标,并将其作为机械设备预防控制目标,过程表示为
minfsh=minPsh
(3)
minfsh为机械设备的有功损耗目标函数;
Psh为设备有功损耗。
1.1.4 目标整合
基于上述获取的机械设备各项目标函数值,整合获取机械设备预防控制[9]的综合目标函数,过程表示为
minfzh=min(ζfsh+υfy+ωfdy)
(4)
minfzh为整合目标函数;
ζ、υ、ω分别为各个目标函数的权重向量值。
1.1.5 机械设备电气出力极限计算
机械设备安全风险指标获取过程表示为
αfx=yi0×Psh
(5)
αfx为机械设备安全风险指标;yi0为相移裕度。依据上述计算结果对机械设备的预估故障严重程度进行排序,电气安全风险[10]系数越小,说明机械设备可能出现的故障就越严重。
机械设备发电机节点出力的比例系数为
(6)
φi为获取机械设备发电机节点出力的比例系数;
hi为发电机节点;
m为总数量;
zhi为预防控制指标向量;
ΔmaxPyg为机械设备的最大有功出力。通过式(6)计算结果,获取设备最佳有功出力极限,即
[Pgli+φiΔmaxPyg,Pgli+φiΔminPyg]
(7)
φiΔmaxPyg、φiΔminPyg分别为机械设备的极限有功出力;
Pgli为机械设备i部分的极限发电功率。
1.2 机械设备电气控制模型设计
依据上述获取的各项指标,建立机械设备的预防控制模型,表达式为
(8)
δm为机械设备预防控制模型;
min[fzh(x0,x)]为预防控制方程。最后通过控制方程求解,实现机械设备的预防控制,控制流程如下所述:
a.提取机械设备电气安全运行指标,获取机械设备出力极限,分析机械设备故障模式。
b.计算预估故障风险指标系数,剔除干扰程度较低的故障数据。
c.计算机械设备电机节点以及参与的指标,确定电机组合出力比例。
d.依据机械设备出力极限以及各项目标函数建立机械设备安全控制模型。
e.对模型方程进行求解,依据模型求解结果实现机械设备电气控制,提高设备电气安全控制。
在上述设计的机械设备电气安全控制模型基础上,为提升机械设备电气安全,引入PLC单值模型,完成机械设备电气安全控制。
设定待控制对象的单值模型卷积方程式为
(9)
νi(i=1,…,M)为设备时间脉冲系数;
γ(k)为卷积系数;
M为脉冲数量;
a(k)为常数项;
j(k)为设备卷积方程。机械设备输出结果为
(10)

由于单值模型预测输出值与时间设备电气输出之间存在误差,需要依据模型实际预测误差校正处理,获取机械设备待控制对象的第l步预测输出,过程为
jl(k+l)=jn(k+l)+σ[j(k)-jn(k)]
(11)
jl(k+l)为机械设备的电气闭环输出;
jn(k+l)为开环输出值;
σ为机械设备电气实际预测值。
依据上述结果获取机械设备电气安全控制加权性能指标[11-13],得

(12)
δτ为机械设备的电气加权控制指标;
ε为性能参数;
η为加权系数;
r2(k)为设备加权项。
依据上述PLC单值模型[14-15]进行机械设备电气安全控制时,在k时刻改变模型控制量,可完成机械设备的电气安全控制。
在此基础上,获取设备阶跃响应时间,以此实现机械设备的电气安全控制,即
T(s)=(K/G+1)·λ-ιs
(13)
T(s)为控制器的传递函数;
K为机械设备的电气静态增益;
ι为滞后时间系数;
λ为传递系数;
G为设备脉冲数量。
3.1 实验方案设计
为验证上述安全控制方法的整体有效性,需要进行实验研究。实验中以某工厂的机械电气设备为研究对象,对该设备的电气安全进行有效控制。分别采用基于PLC的机械设备电气安全控制方法(本文方法)、带有量化的信息物理系统安全控制(文献[3]方法)、马尔可夫信息物理系统拒绝服务攻击安全控制(文献[5]方法)进行测试。
3.2 实验结果分析
3.2.1 裕度提升效果测试
在样本机械设备电气安全控制过程中,电压裕度值提升结果能够侧面证明控制方法的控制性能。在机械设备电气安全控制过程中,电压裕度值越高,说明该安全控制方法的控制性能越差,电压裕度值越低,说明安全控制方法控制性能越好。采用本文方法、文献[3]方法以及文献[5]方法对电气安全控制时,测试3种方法控制下电压裕度提升情况,测试结果如图1所示。

图1 不同控制方法电压裕度值测试结果
由图1可知,电压节点幅值的增加会提升电压裕度值测试结果。本文方法经过安全控制后测试出的电压裕度值低于文献[3]方法及文献[5]方法的电压裕度值,且能够在电压节点幅值增长至一定规模时,将电压裕度值稳定在固定范围内。这主要是由于本文方法在机械电气安全控制前,设置控制模型,能够有效控制电压裕度的提升范围。
3.2.2 越限情况测试
随机选定1组机械设备,设定该设备线路极限容载量为208 A,测试3种控制方法控制后线路超限情况,测试结果如图2所示。
由图2可知,测试次数增加会提升线路的容载量。本文方法在测试线路容载时,测试出的容载量位于固定极限容载范围内,而文献[5]方法在测试次数为300时,线路容载就超出极限容载量,文献[3]方法也在测试次数为400时,超出极限容载。由此可知,本文方法在安全控制时,能够将设备的线路容载固定在极限容载范围内,说明该控制方法的控制性能优于其他2种控制方法。
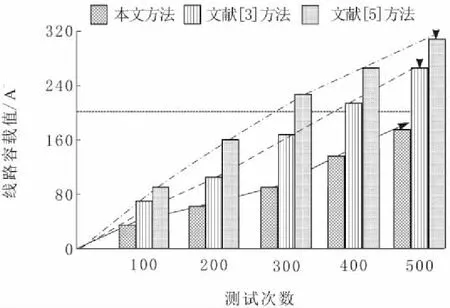
图2 不同控制方法线路越载情况测试结果
3.2.3 控制时间测试
在安全控制过程中,控制时间越短,说明控制效果越好,反之则越差。测试上述3种控制方法的安全控制时间,测试结果如表1所示。

表1 不同控制方法的控制时间测试结果
由表1可知,随着电压节点数量的不断增加,3种算法的安全控制时间均呈直线上升趋势,其中,本文算法安全控制时间在3种控制方法中最低。由此可证明,本文算法受到设备电压节点数量的影响比较小,安全控制方法具备有效性。
随着机械设备构造越来越复杂,机械设备的电气安全控制变得愈加重要。针对传统电气安全控制方法中存在的问题,提出基于PLC的机械设备电气安全控制方法。该方法依据设备控制指标构建电气安全控制模型,并依据PLC单值模型完成控制器设计,实现机械设备的电气安全控制。实验结果表明,采用本文方法可有效提升机械设备的电气安全性。
猜你喜欢 裕度安全控制机械设备 负反馈放大电路的稳定性分析与设计电气电子教学学报(2022年3期)2022-07-30建筑工程管理质量与安全控制探究房地产导刊(2022年5期)2022-06-01肋骨许用应力对环肋圆柱壳结构设计的影响中国舰船研究(2022年1期)2022-03-19关于加工企业的食品安全控制行为分析商品与质量(2021年43期)2022-01-18建筑施工现场的安全控制建材发展导向(2021年7期)2021-07-16机电机械设备安装中存在的隐患及解决方法建材发展导向(2021年7期)2021-07-16食品机械设备的维修管理策略科技创新导报(2021年31期)2021-05-10广州钰铂机械设备制造有限公司汽车维修与保养(2021年12期)2021-03-08Ui关于汽轮发电机定子冷却水泵频繁失效的原因分析与研究科学导报·科学工程与电力(2019年22期)2019-10-21广州钰铂机械设备制造有限公司汽车维修与保养(2019年4期)2019-09-11